



码垛机中的输送带运输过程中跑偏该如何处理
当输送带跑偏时,带推动立锥辊,使固定在锥辊的座叉偏转一个角度,经拨销带动横销靠向侧托辊端面挡块,侧辊被制动,输送带与其产生滑动摩擦使托辊组架绕垂直轴转动一个角度,使带移向中心。
采用新型托辊现有托辊结构都是由管体、垫圈、轴承座、心轴、轴承、内外密封圈等组成。数量多、重量大,轴承座与管体连接可靠性差。为此,可采用新型的对旋螺弹簧形式的托辊,其结构由轴承座、固定在轴承座上的对旋弹簧、轴承、带钩头的心轴、密封圈、挡圈等组成。







码垛机是靠自身动力和控制能力来实现各种功能的一种机器。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等,关键技术包括:
模块化层次化的控制器软件系统,软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性。整个控制器软件系统分为硬件驱动层、核丨心层和应用层。
码垛机运输带的常见处理方法
当输送带跑偏时,带推动立锥辊,使固定在锥辊的座叉偏转一个角度,经拨销带动横销靠向侧托辊端面挡块,侧辊被制动,输送带与其产生滑动摩擦使托辊组架绕垂直轴转动一个角度,
使带移向中心。采用新型的强力调心托辊架组新型强力调心托辊架组结构与传统产品差不多,保留原回转机构、大梁。托辊改成了几段结构,两边立辊改成锥形辊,同时增设固定锥形辊的座叉、
托辊端面的挡块以及锥辊下的横销。
采用新型托辊现有托辊结构都是由管体、垫圈、轴承座、心轴、轴承、内外密封圈等组成。数量多、重量大,轴承座与管体连接可靠性差。
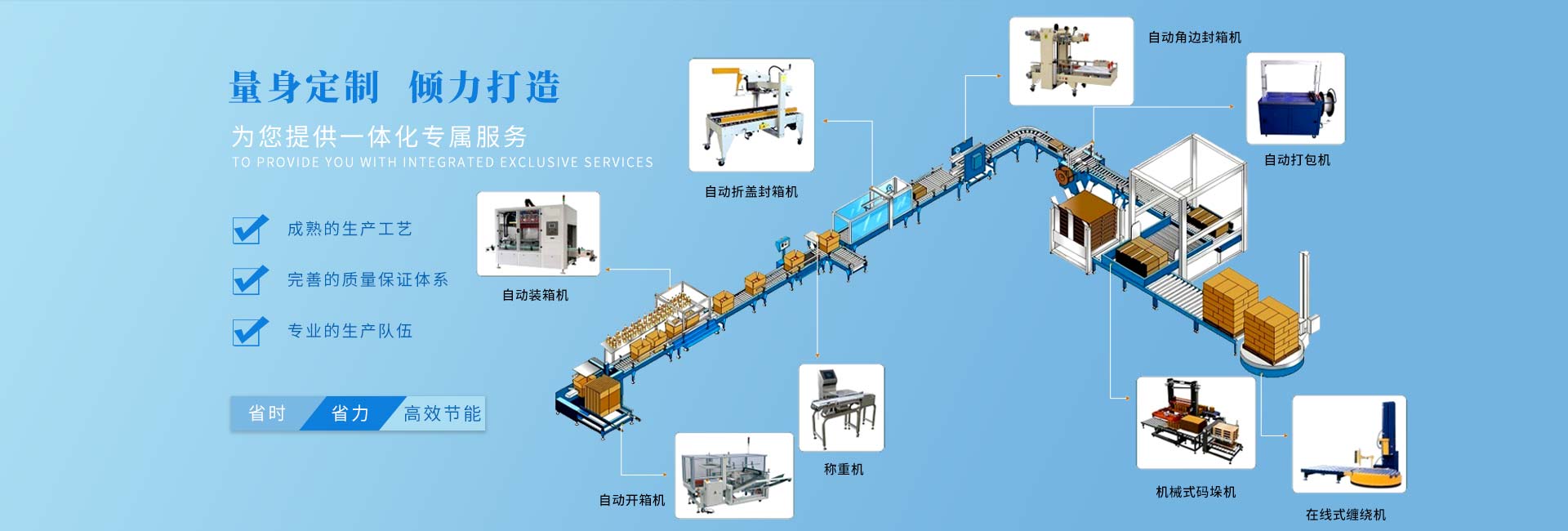
码垛机的技术特点
1.低位进箱,占用空间少,生产能力大。
2.整机PLC控制,全自动运行。
3.适应多种垛型及瓶型,调整方便。
4.多处安全保护,可带触摸屏控制。
5.采用输送链分段传动,输出段可任意加长。
6.电机、气缸传动及控制全部采用进口元件。
7.尽量采用304材料,整机美观大方。
8.特别适应于码热收缩膜包装的产品。




 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


